Base class for ROS publishers in a filter pipeline. More...
#include <fkie_message_filters/publisher_base.h>
Public Member Functions | |
| virtual bool | is_active () const =0 |
| Check if the publisher is active. More... | |
| virtual std::string | topic () const =0 |
| Return advertised topic name. More... | |
Protected Member Functions | |
| std::tuple< boost::signals2::connection, boost::signals2::connection > | link_with_subscriber (SubscriberBase &sub) |
| Add a new subscriber that will be controlled by this publisher. More... | |
| void | update_subscriber_state () |
| Cause all linked subscribers to subscribe or unsubscribe to their ROS topics. More... | |
Detailed Description
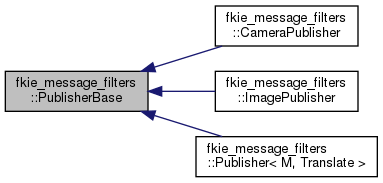
Base class for ROS publishers in a filter pipeline.
ROS subscribers and publishers can act as sources and sinks in the message filter library. This class provides some basic functionality for on-demand subscriptions.
- See also
- Publisher
Member Function Documentation
◆ is_active()
|
pure virtual |
Check if the publisher is active.
Returns true if the number of subscribers is greater than zero. The result of the function is used to subscribe or unsubscribe linked subscribers on demand.
- Exceptions
- Does not throw any exceptions.
Implemented in fkie_message_filters::Publisher< M, Translate >, fkie_message_filters::CameraPublisher, and fkie_message_filters::ImagePublisher.
◆ link_with_subscriber()
|
protected |
Add a new subscriber that will be controlled by this publisher.
subthe subscriber- Returns
- two connection objects for the signal to enable and disable the linked subscriber
- Exceptions
- Propagates exceptions raised by the implementation of the abstract class methods.
◆ topic()
|
pure virtual |
Return advertised topic name.
- Exceptions
- Depends on the implementation.
Implemented in fkie_message_filters::Publisher< M, Translate >, fkie_message_filters::CameraPublisher, and fkie_message_filters::ImagePublisher.
◆ update_subscriber_state()
|
protected |
Cause all linked subscribers to subscribe or unsubscribe to their ROS topics.
This will check the return value of is_active() to determine if the publisher is active, and then call SubscriberBase::subscribe_impl() or SubscriberBase::unsubscribe_impl() accordingly.
- Exceptions
- Propagates exceptions raised by the implementation of the abstract class methods.
The documentation for this class was generated from the following files:
- include/fkie_message_filters/publisher_base.h
- src/publisher_subscriber_base.cpp
